Transporting Thousands of Micro-objects with Collective Behavior of Magnetic Robots
Along with the rapid growth of AI and autonomous driving technologies, active research on smart materials has accelerating the robots era. As robot industry has diversified from metal-based robot industry, which was mainly developed in the past in manufacturing industries, to soft robot, our lives are rapidly changing in various fields including bio, human interface, aviation and space. As soft robots made of soft materials are lighter, less harder and more flexible than metal robots, they have a wider expectation of use, which has led a lot of researchers to actively conducting studies on them.
Following this trend of time, Professor Wie Jung-jae’s research team from the Department of Organic and Nano Engineering has developed a technology that can collect thousands of floating micro plastics through collective behavior control of magnetic robots. This technology is expected to collect and transport thousands of microplastics introduced into the ocean in a short time, as well as be used for medicine delivery, micro-object transportation, and vortex control.
Collective behavior control captures microplastics creating vortexes on water
Microplastics are decomposion products of plastic waste from various industrial products and goods such as paper cups, plastic bags, and synthetic fiber clothing. When they are introduced into the ocean, organisms such as birds and fish waste are mistaken for food, which can lead to their death when ingested, as well as threaten people through the food chain. To solve this problem, it is necessary to develop a technology to capture floating microplastics. However, it is not only difficult to collect and transport thousands of plastic particles one by one, but it also takes a lot of time. Accordingly, Professor Wi's team developed a collective behavior control of magnetic robots with high-speed mobility to create vortexes on the surface of water and capture microplastics in the vortex.
Collective behavior is a common phenomenon in groups of ants, fish, and birds in the natural world. By doing this, many creatures can cooperate to move food or defend themselves against predators. Leveraging the collective behavior of multiple objects in robotics can complete tasks that are difficult to perform with a single object, as well as effectively perform time-consuming tasks.
A gripper-type robot picks up objects one by one, transfers them to the desired position, and puts them down. Though it can have delicate motion control, it is hard to move thousands of objects. Instead of a gripper robot, Professor Wie's team developed a magnetic robot capable of high-speed swimming. When a planar rotating magnetic field was applied under the board on which the robot was located, the magnetic robot group was rotated at a high speed on the water. As a result, they have implemented a technology that can create a vortex on the surface of the water and capture thousands of floating micro plastics within the generated vortex.
If the inertial force was higher than the drag force applied to the robot by changing the rotating magnetic field condition, the swimming mode of the magnetic robot group could be switched from rotating to linear translational swimming. When a group of magnetic robots swam in a straight translation way at high speed, it was possible to block microparticles from entering a particular area or trap microparticles transferred into the area. In particular, it is easy to adjust the size of vortex since the assembly length may be changed depending on the swimming mode of the robots.
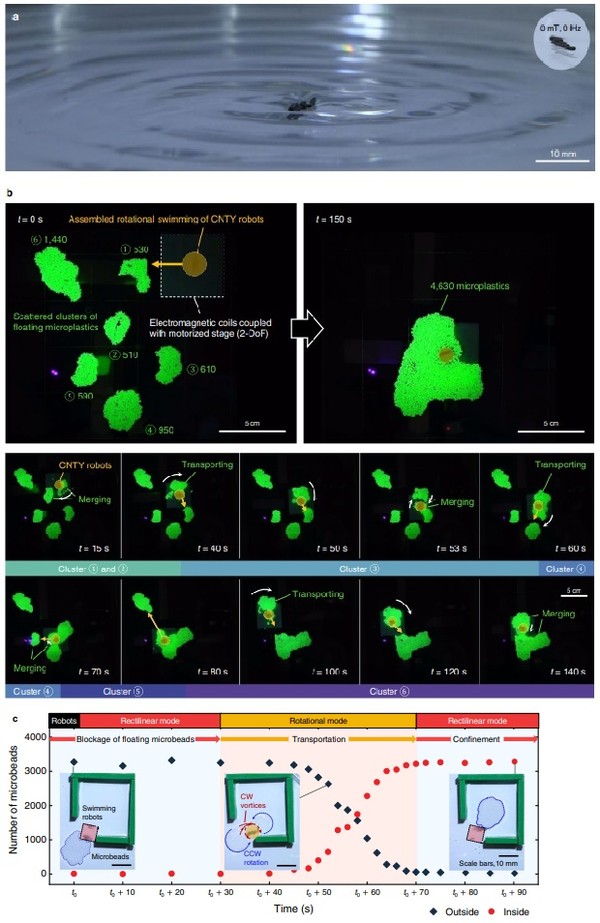
Professor Wie's magnetic robots is designed to be able to float on the surface of the water and swim quickly against the surface tension and drag of the water. This is because carbon nanotube yarn, which has high rigidity and low density, was used as the skeleton of the robot. As a result, their magnetic robots were able to swim in water at a speed up to twice that of the saltpier, as well as was able to transport and collect 4,000 microplastics within a few minutes.
Expected to be widely applied to various fields
Magnetic robots have been focused on applications such as drug delivery and imaging in medical engineering field until now. This is because magnetic robots can not only control movement with a magnetic field from outside, but also be miniaturized because they have no wires or batteries in them. Professor Wie said, "This study presents possibility of diversified use of magnetic robots. It is expected to be applicable not only to medical technology such as microplastic collection and drug delivery, but also to applications such as eddy control in microfluids when moving ultra-small objects," he said.
Professor Wie said regarding the ongoing follow-up study, "We are conducting research to utilize the collective behavior of magnetic robots and find new applications." He said, "We plan to conduct research on collective behavior that can occur when dozens or hundreds of magnetic robots are increased. Using a robot swarm, things that was impossible with a single robot or a small number of robots could be done. We will develop technology that enables mass-production of magnetic robots in advance," he said, regarding his future research plan.
The findings' paper, "Multimodal Collective Swimming of Magnetically Articulated Modularly Nanocomposite Robots," was published on November 8 in the internationally renowned journal, Nature Communications (IF=17.694). Won Soo-kyung in her Ph.D., majoring in Research Institute of Industrial Science at Hanyang University and Polymer Environmental Convergence Engineering at Inha University, and Lee Hee-eun, graduate from Polymer Environmental Convergence Engineering major of Inha University participated as co- first authors and conducted a joint study with Professor Yang Seung-jae’s research team of Inha University. It was also conducted with the support of the Basic Research Project (Medium Research) conducted by the Ministry of Science and ICT, the U.S. Air Force Research Institute, and the Korea Institute of Science and Technology.
Click to see the paper: