4月27日的机器人消息介绍了“年轻机器人工学者”
在韩国机器人学会和机器人消息一起挖掘并介绍引领未来韩国机器人产业的年轻机器人工学者的“年轻机器人工学者(Young Robot Engineer)”栏目中介绍了汉阳大学金完洙教授。
金教授的主要研究领域是利用合作机器人或外骨骼机器人的人类-机器人相互作用研究。其中,他专门研究着向与机器人进行合作工作的工作者提供物理性的帮助,并由肺循环(closed loop)构成的人类-机器人相互作用模型及利用该方法的控制框架(Control framework)。
今后将持续的研究内容是添加人类工学要素的以人为中心的人类-机器人合作,因此将开发利用合作机器人或移动机械的操纵器的控制框架。
人类工学是指分析在工厂等恶劣环境下工作人员的姿势、反复的负载等危险因素,以此预防肌骨系统疾病而使用的学问,是通过在产业环境中使用考虑到工作人员的人体特性的系统和环境的高效构成,提高工作人员便利的科学方法。虽然人类工学性的协作控制在机器人研究领域是非常新的主题,但是为了人类和机器人的可持续性合作,正逐渐被认为是重要的因素,且类似的研究也在增加。

还提到了获得汉阳大学博士学位的学位论文《Human Synchronized Gait Control of the HEXAR-CR50 to Augment Lowe Body Strength Based on the Human-Robot Interaction Force》。这是概述金教授在2006年第一次在汉阳大学尖端机器人研究室,在韩昌洙教授的指导下,从开始研究外骨骼机器人到2015年为止进行的Hanyang Exoskeleton Assistive Robot(HEXAR:汉阳外骨骼支援机器人)的下肢外骨骼机器人技术开发的内容。首先这包括了以人为中心的外骨骼机器人和接口设计技术、人类-机器人相互作用力建模及控制战略技术开发内容。之后还包括了用相互作用力的建模和控制战略, 在人类和机器人为了一起进行同一工作动作时所需的掌握人类动作意图和控制顺应此意图的机器人动作的方法。
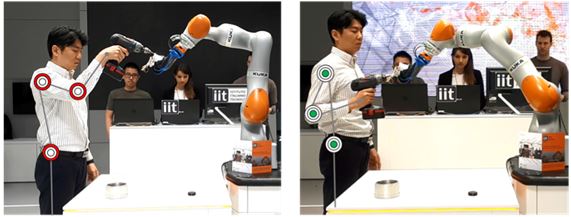
金教授说:“人类-机器人合作研究中,人类也包含在了机器人的控制循环中,这是最大的难点,也是魅力点。”虽然进行研究并验证其效果的过程非常复杂,但是从使用在现实生活中的角度来看,我觉得这是一个比任何一种研究领域都接近目的的研究领域。”为了让机器人在未来也被认为不是威胁人类工作岗位的存在,而是为了合作的伙伴。他说,他的目标是开发更加熟悉和方便使用的协作机器人。
另外,金教授毕业于汉阳大学ERICA机械工程系,2008年3月进入了汉阳大学研究生院硕博综合课程,2015年2月以机械工学获得了博士学位。在大学就读中的2006年8月至2008年2月,在汉阳大学尖端机器人研究室( CIM&Robotics Lab)做了实习研究员,2008年3月至2015年2月作为辅助研究员参与了4足机器人开发、下肢外骨骼机器人开发。博士毕业后,2015年3月至2016年2月,1年在汉阳大学ERICA校区工学技术研究所,2016年5月至2021年2月,约5年在“意大利工学研究所(IIT:Istituto Italiano di Tecnologia)”担任了博士后研究员。从今年3月开始担任了汉阳大学ERICA校区机器人工程系的助理教授。