4월 27일자 로봇신문, '젊은 로봇 공학자'로 소개
한국로봇학회와 로봇신문이 함께 미래 한국 로봇 산업을 이끌어 갈 젊은 로봇 공학자를 발굴해 소개하는 '젊은 로봇 공학자(Young Robot Engineer)' 코너에 한양대학교 김완수 교수가 소개되었다.
김 교수의 주 연구 분야는 협동 로봇 또는 외골격 로봇을 활용하는 인간-로봇 상호작용에 관한 연구이다. 그중에서도 특히 특히 저는 로봇과 협업을 하는 작업자에게 물리적인 도움을 제공하기 위한 폐 루프(closed loop)로 구성된 인간-로봇 상호작용의 모델링 및 이를 이용하는 제어프레임워크 (control framework)에 관하여 연구하고 있다.
앞으로 지속할 연구 내용으로는 인간공학적 요소가 가미된 인간중심의 인간-로봇 협업이며, 협동 로봇 또는 모바일 머니퓰레이터를 활용한 제어프레임워크를 개발하는 것이라고 밝혔다.
인간공학이란 공장과 같은 험한 환경에서 작업자의 자세, 반복적 부하 등의 위험 요소를 분석하고 근골격계질환을 예방하기 위해서 활용하는 것과 같이 산업 환경에서 작업자의 인체 특성을 고려하여 시스템, 환경의 효율적인 구성을 통해 기존보다 작업자의 편의를 향상하기 위한 과학적 접근법이다. 인간 공학적 협업 제어는 로봇 연구 분야에서 매우 새로운 주제이지만 인간과 로봇의 지속 가능한 협업을 위한 방안으로 점차 중요한 요소로 인식되고 있으며, 유사한 연구들도 증가하고 있는 내용이다.

한양대학교 박사 학위를 받았던 “Human Synchronized Gait Control of the HEXAR-CR50 to Augment Lowe Body Strength Based on the Human-Robot Interaction Force”에 관해서도 이야기했다. 이는 김교수가 2006년 처음 한양대학교 첨단로봇연구실에서 한창수 교수님의 지도하에 외골격 로봇 연구를 시작할 때부터 2015년까지 진행한 Hanyang Exoskeleton Assistive Robot(HEXAR:한양외골격지원로봇)라는 하지 외골격로봇 기술 개발에 대한 내용을 집약한 내용이다. 첫째로는 인간 중심의 외골격 로봇 및 인터페이스 설계 기술, 인간-로봇 상호작용력 모델링 및 제어 전략 기술 개발 내용을 포함하고 있다. 다음으로는 상호작용력의 모델링 및 제어 전략으로, 인간과 로봇이 함께 동일한 작업 동작을 수행하기 위해 필요한 인간의 동작 의도 파악 및 의도에 순응하는 로봇의 동작 제어 방법도 포함한다고 밝혔다.
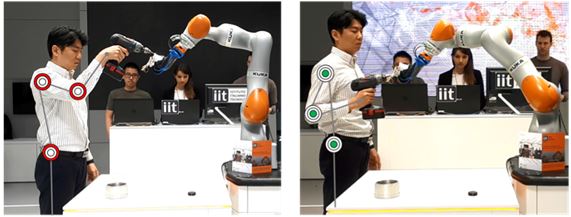
김 교수는 인간-로봇 협업 연구에 인간이 함께 로봇의 제어루프 안에 포함되어 있다는 점이 가장 큰 어려운 점이면서도 매력적인 점이라고 이야기했다. “연구를 진행하고 그 효과를 검증하는 과정은 매우 까다롭지만, 실생활에서 활용하기위한 관점에서 어느 연구 분야보다 그 목적에 근접한 연구 분야임을 느낀다”며 로봇이 지금도 미래에도 인간의 일자리를 위협하는 존재가 아닌 협업을 위한 파트너로 인식될 수 있도록, 더욱 친숙하고 편하게 사용할 수 있는 협업 로봇을 개발하고 싶다는 목표를 밝혔다.
한편 김 교수는 한양대 ERICA 기계공학과를 졸업하고 2008년 3월 한양대학교 대학원 석박사 통합과정에 진학해 2015년 2월 기계공학으로 박사 학위를 받았다. 대학 재학 중인 2006년 8월부터 2008년 2월까지 한양대 첨단로봇연구실(CIM&Robotics Lab)에서 인턴 연구원, 2008년 3월부터 2015년 2월까지 보조연구원으로서 4족 로봇 개발, 하지 외골격 로봇 개발에 참여했다. 박사 졸업후에는 2015년 3월부터 2016년 2월까지 1년간 한양대 ERICA 캠퍼스 공학기술연구소, 2016년5월부터 2021년 2월까지 약 5년간 '이탈리아공학연구소(IIT:Istituto Italiano di Tecnologia)'에서 박사후 연구원으로 근무했다. 올해 3월부터 한양대 ERICA 캠퍼스 로봇공학과 조교수로 근무하고 있다.
 '한양위키' 키워드 보기
'한양위키' 키워드 보기