곤돌라에 설치해 넓은 면적을 빠른 속도로 청소할 수 있는 로봇
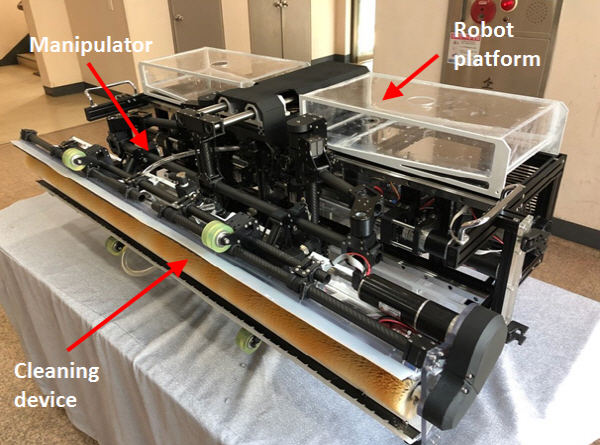
청소 로봇은 기존 곤돌라에 고정돼 로봇 팔을 이용해 구동하며, 쉽게 장착 및 해체 할 수 있다. 동승한 탑승자가 로봇의 전원만 켜주면 자동으로 곤돌라의 동작과 함께 고층 빌딩 외벽 청소를 수행한다. 곤돌라의 하강 속도에 맞춰 청소하므로 청소 속도가 매우 빠른 장점을 갖고 있다.
로봇신문 8월 30일 자 기사에 따르면, 서 교수는 “우수한 청소 성능을 위해 실제 청소를 하는 유닛을 설계하는 것이 중요하다"며 "청소 유닛을 닫힌 구조로 설계해 사용한 청소 용수를 회수하고 2차 오염을 방지할 수 있도록 기술을 구현했다”고 말했다. 또 “실제 빌딩에서 필드테스트를 진행, 2차 오염없이 청소를 성공적으로 수행할수 있다는 점을 확인했다”고 덧붙였다.
로봇은 분사한 청소 용수를 위 아래에 장착된 스퀴지(squeegee)를 이용해 흡수하는 메커니즘을 채택해 2차 오염을 최소화한게 특징이다. 중앙에 있는 브러쉬가 잘 닦이지 않는 오염물을 제거하는 역할을 한다.
현재 상용화를 위한 시제품을 제작 중이며 '2019 두바이 건축기자재 전시회(The Big 5 show)'에서 공개할 예정이다.
고층 빌딩 청소는 연 11조 정도로 추산되는 시장이며, 국내에서만 연 15명 정도의 사상자가 발생하는 고위험 작업이다. 또한, 작업이 매우 어렵고 힘들어 자동화가 꼭 이루어 져야 되는 작업으로 인식되고 있다.
한편 이번 연구는 서울대, 카이스트, 경기대, 씨에스캠㈜, ㈜알에프가 개발에 함께 참여했다.
관련기사
 '한양위키' 키워드 보기
'한양위키' 키워드 보기
디지털뉴스팀
newsh@hanyang.ac.kr