9월 이달의 연구자상 박종현 교수(공과대·기계)
풋슬립(foot slip)을 사용해 로봇의 빠른 방향 전환을 가능케 해
로봇은 발전한다. 기어가던 로봇이 두발로 섰고, 기계음을 내던 로봇이 대답을 하고, 결국 인간보다 먼저 화성에 도착했다. 공상과학 영화에서 나오는 로봇이 현실에서 가능할까. 학창시절 '과학 상상 그리기' 대회에 텔레비전이 나오고, 영상통화가 되는 손바닥만한 전화기를 그려냈던 일이 생각날 것이다. 과학의 발전은 어린이의 상상을 현실로 만들었다. 급변하는 시대, 내일 당장 인간과 똑 닮은 로봇이 나와도 고개를 끄덕일 시대. 8월의 이달의 연구자로 선정된 박종현 교수는 로봇의 한 단계 성장을 이뤄냈다.
인간의 모습을 적용하다, 풋슬립
인간이 동물과 다른 가장 큰 특징은 두발로 걷는다는 것. 인간과 닮은, 인간을 넘어서는 로봇의 탄생을 위해 넘어야 할 가장 큰 산은 자유롭게 두발로 걷는 것이다. 매스컴을 통해 전해지는 로봇의 모습은 직립보행은 물론 춤을 추기까지 한다. 하지만 박종현 교수(공과대·기계)는 아직 걸음마 단계라고 말한다. "로봇이 인간처럼 지면을 두발로 걷는 것은 정말 쉽지 않은 기술이에요. 걸을 수는 있겠죠. 하지만 인간처럼 자연스럽게 걷는 것이 아니에요. 로봇은 조그만 장애물에도 민감하고, 오차를 인지하지 못하고 넘어지죠. 이족보행 로봇은 아직 시작단계 입니다." 로봇은 인간에겐 지극히 단순한 방향전환을 하는 것 또한 큰 숙제다. 기본적으로 이족보행 로봇은 직립시 안정성을 위해 발바닥이 다른 구조에 비해 크게 설계된다. 이로 인해 방향전환시 제자리에서 종종 걸음으로 천천히 몸체를 돌리는 등 동작이 자연스럽지 못했다. 제어능력이 부족하기에 시간도 오래 걸리고, 자신의 발에 걸려 넘어지기도 한다.
박 교수의 논문은 인간의 보행하는 모습을 관찰, 새로운 알고리즘을 개발해 이 점을 해결하는데 응용했다. "풋슬립(foot slip)은 인간의 방향전환 모습을 따서 개발했어요. 여러분이 걷다가 한쪽으로 방향을 전환할 때를 생각해보세요. 몸을 틀고 축이 되는 발을 자연스럽게 미끄러트려 방향을 바꾸죠? 그것을 로봇에 적용한 겁니다. 로봇은 구조상 방향을 틀 수 있는 신체에 제한이 있어요. 조금 더 자연스러운 회전을 위해 허리와 발목 둘 다 틀 수 있는 로봇을 개발했죠. 로봇이 풋슬립을 사용할 때 가장 큰 문제는 중심이 흐트러져 넘어지는 거에요. 로봇은 발이 커서 회전할 때 안정성이 떨어지죠. 그래서 회전시스템에 동역학적 모델을 적용, 3차원 동역학 모션을 이용해 회전을 계획하고 제어시스템을 적용해 이를 극복했습니다." 동역학이란 물체 사이에 작용하는 힘과 운동과의 관계를 말한다. 힘의 작용에 따라 가속도가 증가하고 운동이 발생하는데, 로봇이 회전할 때 몸을 트는 힘을 주면서도 지지하는 발이 고정되는 정도의 한계점을 구하는 것이 골자다. 힘에 따른 가속도가 붙어 지지하는 발의 고정 한계점을 넘어설 때 로봇은 비로소 허리와 발목을 돌려 안정되게 회전한다. 이런 회전 방법은 기존 로봇의 회전 방법보다 인간과 비슷하며 효율 또한 높다.
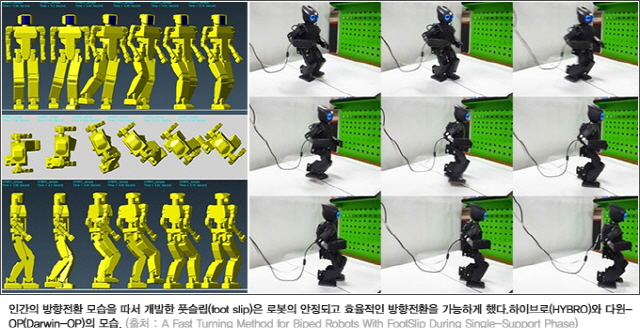 |
박 교수는 로봇이 회전할 때 두 가지 전략을 실험했다. 첫 번째 전략은 로봇이 회전 후 발을 정렬하지 않고 바로 앞으로 가려는 운동을 진행하는 것, 두 번째 전략은 로봇이 회전 후 발이 엇갈리는 것을 피하려 노력 한 후 운동을 진행하는 것이다. 이 두 가지 전략을 실험하기 위해 하이브로(HYBRO)와 다윈-OP(Darwin-OP)를 이용했다. 하이브로(HYBRO)는 우리대학에서 개발한 어린이 크기의 로봇으로 시뮬레이션을 하는데 사용했고, 로보티즈(ROBOTIS)사에서 개발한 다윈-OP(Darwin-OP)는 오픈소스 플랫폼으로 도면과 소프트웨어를 모두 공개한 로봇으로 실제 실험을 진행하는데 사용했다. 실험 결과 다윈-OP(Darwin-OP)은 한 번에 80도를 회전하는데 1초 밖에 걸리지 않았다. 풋슬립 기술은 더 빠르고 자연스러운 방향전환을 가능케 해 이족보행 로봇의 신체적 한계를 극복했다. 이는 향후 로봇의 격렬한 춤이나 운동중의 빠른 방향전환에 사용 할 수 있을 것으로 기대된다.
특정 상황에서 인간보다 뛰어난
로봇은 두발로 걷고, 방향을 바꾸는 데도 수 많은 기술개발과 연구가 필요하다. 안면인식 로봇이 개발됐지만 작은 조명에 따라서도 기복이 심하며, 음성인식 로봇 또한 소음의 유무에 따라 한계를 보인다. 그럼에도 불구하고 계속해서 로봇 개발에 힘써야 하는 이유는 특정 상황에서 로봇의 활용 가능성 때문이다. "사람은 치타처럼 빠르게 뛸 수 없지만 로봇은 기술개발에 따라 무한한 가능성이 있어요. 사람과 닮은 능력 혹은 그 이상을 갖고 제어까지 가능할 땐 로봇의 사용용도는 끝이 없죠." 현재 로봇 기술은 기술개발에 따른 비용으로 인해, 가격은 비싸지만 기술은 수준은 그 만큼 높지 못해 산업용으로 판매하기에는 한계가 있다. 이 때문에 대부분 국가적 차원으로 길게 투자 개발되고 있다. 이렇게 개발된 로봇은 군사 혹은 의약, 안전 분야에서 사용된다. "앞으로 이공계 기술이 의료계통에서 활발히 응용 될 거에요. 거동이 불편한 노약자를 돕거나 재활치료를 돕는데 사용되는 것이 그 예죠."
 |
박 교수는 평생 로봇제어를 연구해온 로봇마니아다. 인공지능 측면보단 로봇이 넘어지지 않고 잘 갈 수 있도록 기계적이고 물리적인 측면에 초점을 맞춰 연구를 진행해왔다. 박 교수의 연구 목표와 철학은 무엇일까. "정책자들이 매스컴을 통해 장밋빛 미래를 보여주고 싶어하는 것과 달리 현재 로봇이 인간을 쫓아가는 데는 명백히 한계가 있어요. 사실 복제인간을 개발할 정도로 생명과학 기술이 발전하면 로봇의 역할은 끝날지도 몰라요. 그렇기에 인간보다 더 뛰어난 능력을 갖춘 로봇이 필요하죠. 인간을 쫓아가면서도 특정한 상황에선 인간 너머의 능력을 가진 로봇을 개발하고 싶어요. 저는 로봇 연구를 하는 것이 너무 재미있습니다. 새로운 것을 계속 개척하고 기계의 능력을 확장시키는 일은 흥미로운 작업이죠. 연구자체를 즐기는 사람은 이길 수 없어요. 우리대학 학생들도 삶 자체를 즐기고 재미있는 것을 했으면 좋겠어요. 술·담배를 통해 인생을 즐기라는 것이 아니라 진정 자기가 하고 싶은 일을 즐기면서 했으면 좋겠습니다."
박종관 학생기자 pjkko@hanyang.ac.kr
이 기자의 다른 기사 보기
권요진 사진팀장 loadingman@hanyang.ac.kr